# 综述
第一代 HoloLens 引入了研究模式,研究不用于部署访问设备上的关键传感器的应用程序。HoloLens2 的研究模式保留了 HoloLens1 的功能,增加了对额外流的访问。同样,对于第一个版本,可以从以下输入中收集数据:
- 可见光环境跟踪摄像机 - 系统用于头部跟踪和地图创建。它们返回每像素 8 位的灰度图像。
- 两种模式操纵下的深度摄像机
- 关节式手跟踪方式 (AHAT),用于手跟踪的高频 (45 帧 / 秒) 近深度传感。支持距离设备 1 米之内的手势追踪,HoloLens2 仅通过计算基于相位的飞行时间相机的 “混叠深度” 来节省电力。这意味着,当距离超过 1 米时,信号只包含到设备的距离的小数部分。
- 空间映射中使用的长抛、低频 (1-5 FPS) 的深度传感。
- 两个版本的红外反射率流 - HoloLens 用来计算深度。这些图像由红外线照射,不受周围可见光的影响。
此外,HoloLens2 还支持访问以下内容:
- 加速度计 - 系统用来确定沿 X, Y, Z 轴的线性加速度以及重力。
- 陀螺仪 - 系统中用来确定旋转的仪器。
- 磁强计 - 系统用于绝对方位估计。
# 大纲
研究模式 API 是基于一种名为 Nano-COM 的轻量级派生。Nano-COM 指的是一种 API 设计模式,它使用 IUnknown 作为对象标识和生存期,但不需要 COM 运行时基础设施,用工厂函数替换 CoCreateInstance 的使用,这些工厂函数返回用参数初始化的对象到这些函数。接口只支持 QueryInterface、AddRef 和 Release。api 返回 HRESULT 错误码。DirectX11 和 12 也是一个 Nano-COM api。
API 的结构如下:
- 首先创建的对象是研究模式设备。这是 API 工厂对象。它用于:
- 按类型枚举可用的传感器
- 创建传感器对象
- 请求访问权限
- 每个传感器类型只能创建一个传感器
- 传感器提供以下功能:
- 返回传感器的名称和类型
- 启动和停止流
- 在流状态下等待和检索帧
- 返回 extrinsics 矩阵,给出传感器相对于设备连接原点 (Rig origin) 的相对位置
- 返回设备坐标帧 GUID,可以用来映射设备坐标帧到其他感知坐标帧
- 传感器可以是摄像机或 imu,两者都返回帧传感器特定的有效载荷格式
- 传感器帧提供:
- 帧时间戳
- 帧大小
- 专门针对每个传感器的属性和有效负载格式。
对于所有传感器,初始化调用应该只进行一次,而且传感器不是线程安全的。帧应该从传感器打开的线程读取。传感器可以共享一个线程,或者每个都有一个线程。
# 主传感器读取循环
主传感器处理循环概述为:
- 创建研究模式设备
- 获取所有传感器所在的设备坐标框架。我们称之为 rigNode,它由 GUID 标识,GUID 可与 HoloLens 感知 api 一起用于映射其他 HoloLens 感知坐标框架中的传感器特定坐标。下面的 https://docs.microsoft.com/en-us/windows/mixed-reality/coordinate-systems 解释了感知坐标框架。
- 枚举传感器
- 获取传感器信息
- 对于摄像机,该对象在摄像机坐标框架中投影 / 取消投影图像点到 3D 点
- Extrinsics 用于相对于设备 rigNode 定位传感器。
下面的代码显示了打开研究模式设备,获取传感器描述符和从传感器获取帧。api 返回应该检查错误的结果 HRSULTS。下面的代码省略了错误检查,以便更容易地执行 API 调用。与坐标框架相关的 api 将在后面的章节中描述。
HRESULT hr = S_OK;
IResearchModeSensorDevice *pSensorDevice;
IResearchModeSensorDevicePerception *pSensorDevicePerception;
std::vector<ResearchModeSensorDescriptor> sensorDescriptors;
size_t sensorCount = 0;
hr = CreateResearchModeSensorDevice(&pSensorDevice);
// This call makes cameras run at full frame rate. Normaly they are optimized
// for headtracker use. For some applications that may be sufficient
pSensorDevice->DisableEyeSelection();
hr = pSensorDevice->GetSensorCount(&sensorCount);
sensorDescriptors.resize(sensorCount);
hr = pSensorDevice->GetSensorDescriptors(sensorDescriptors.data(),
sensorDescriptors.size(), &sensorCount);
for (const auto& sensorDescriptor : sensorDescriptors)
{
// Sensor frame read thread
IResearchModeSensor *pSensor = nullptr;
size_t sampleBufferSize;
IResearchModeSensorFrame* pSensorFrame = nullptr;
hr = pSensorDevice->GetSensor(sensorDescriptor.sensorType, &pSensor);
swprintf_s(msgBuffer, L"Sensor %ls\n", pSensor->GetFriendlyName());
OutputDebugStringW(msgBuffer);
hr = pSensor->GetSampleBufferSize(&sampleBufferSize);
hr = pSensor->OpenStream();
for (UINT i = 0; i < 4; i++)
{
hr = pSensor->GetNextBuffer(&pSensorFrame);
if (pSensor->GetSensorType() >= IMU_ACCEL)
{
ProcessFrameImu(pSensor, pSensorFrame, i);
}
else
{
ProcessFrameCamera(pSensor, pSensorFrame, i);
}
if (pSensorFrame)
{
pSensorFrame->Release();
}
}
hr = pSensor->CloseStream();
if (pSensor)
{
pSensor->Release();
}
}
pSensorDevice->EnableEyeSelection();
pSensorDevice->Release();
return hr;
上面的代码显示了在同一个线程上读取的所有传感器。由于 GetNextBuffer 调用会引起阻塞,每个传感器帧循环应该在自己的线程上运行。这允许以自己的帧速率处理每个传感器。
OpenStream 和 GetNextBuffer 需要从同一个线程调用。GetNextBuffer 调用会引起阻塞。每个传感器的传感器帧循环应该在它们自己的线程上运行。这允许传感器按照它们自己的帧速率进行处理。推荐使用以下线程模式:
- 主线程管理研究模式设备和传感器
- 每个传感器都有一个线程,它打开传感器流,读取缓冲区并处理缓冲区
- 主线程渲染缓冲区和结果
SensorLoop(IResearchModeSensor *pSensor)
{
hr = pSensor->OpenStream();
while (fRunning)
{
hr = pSensor->GetNextBuffer(&pSensorFrame);
ProcessFrame(pSensor, pSensorFrame, i);
if (pSensorFrame)
{
pSensorFrame->Release();
}
}
hr = pSensor->CloseStream();
}
# 传感器类型
# 相机传感器
- Intrinsics (投影 / 不投影)
- 在相机坐标空间的一些功能
- Extrinsics 返回设备空间的 R, T 变换
- 帧被指定为相机帧
# 惯性传感器
- Extrinsics 返回设备空间的 R, T 变换
- 帧被指定为惯性传感器帧
# 传感器坐标帧
每个传感器返回它的变换到 rigNode (Rig origin) 表示为一个外部刚体变换。图 1 显示了相机坐标帧相对于设备坐标帧。注意,在 HoloLens2 上,设备原点对应于左前方可见光相机。因此,该传感器返回的变换对应于恒等变换。
extrinsics 变换可检索如下:
IResearchModeCameraSensor *pCameraSensor;
DirectX::XMFLOAT4X4 cameraPose;
// …
// Get matrix of extrinsics wrt the rigNode
pCameraSensor->GetCameraExtrinsicsMatrix(&cameraPose);
要将 rigNode(以及设备)映射到其他 HoloLens 感知坐标帧中,可以使用感知 api。
using namespace winrt::Windows::Perception::Spatial;
using namespace winrt::Windows::Perception::Spatial::Preview;
SpatialLocator locator;
IResearchModeSensorDevicePerception* pSensorDevicePerception;
GUID guid;
HRESULT hr = m_pSensorDevice->QueryInterface(IID_PPV_ARGS(&pSensorDevicePerception));
if (SUCCEEDED(hr))
{
hr = pSensorDevicePerception->GetRigNodeId(&guid);
locator = SpatialGraphInteropPreview::CreateLocatorForNode(guid);
}
// …
auto location = locator.TryLocateAtTimestamp(timestamp, anotherCoordSystem);
相机传感器暴露映射 / 不映射方法,以在相机投影 3D 点。图 3 显示了摄像机参考帧的 3D 坐标与二维图像坐标的关系。
Map /unmap 方法可以使用如下:
IResearchModeCameraSensor *pCameraSensor;
//…
float xy[2] = {0};
float uv[2] = {0};
float uv_mapped[2] = {0};
for (int i = 0; i <= 10; i++)
{
for (int j = 0; j <= 10; j++)
{
// VLC images are 640x480
uv[0] = i * 64.0f;
uv[1] = j * 48.0f;
pCameraSensor->MapImagePointToCameraUnitPlane(uv, xy);
// …
pCameraSensor->MapCameraSpaceToImagePoint(xy, uv_mapped);
// …
}
}
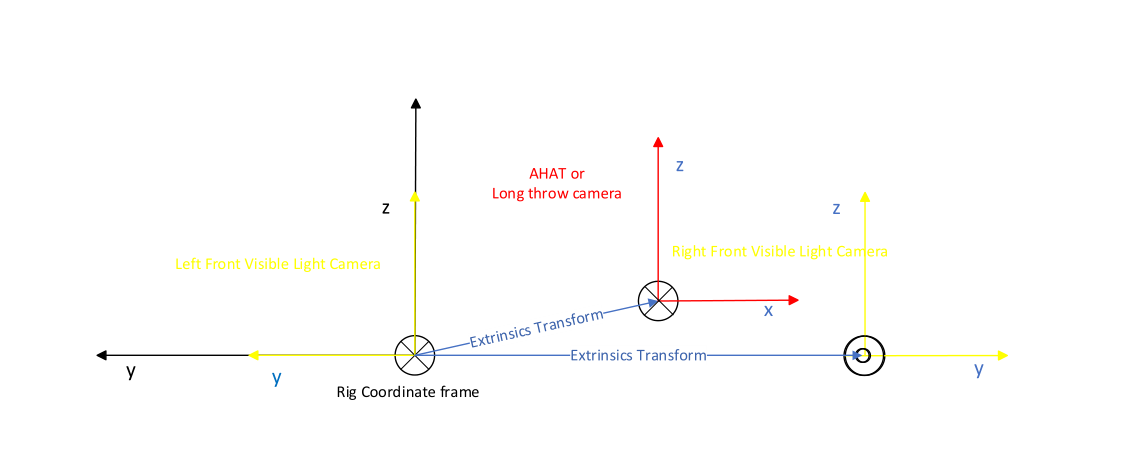
图 1 相对于 rig node 坐标帧的深度和正面可见光相机坐标帧。Long throw 和 AHAT 是同一相机的不同模式,所以外观是一样的。

图 2 Hololens 相机。黄色是 VLC 相机,红色是深度相机
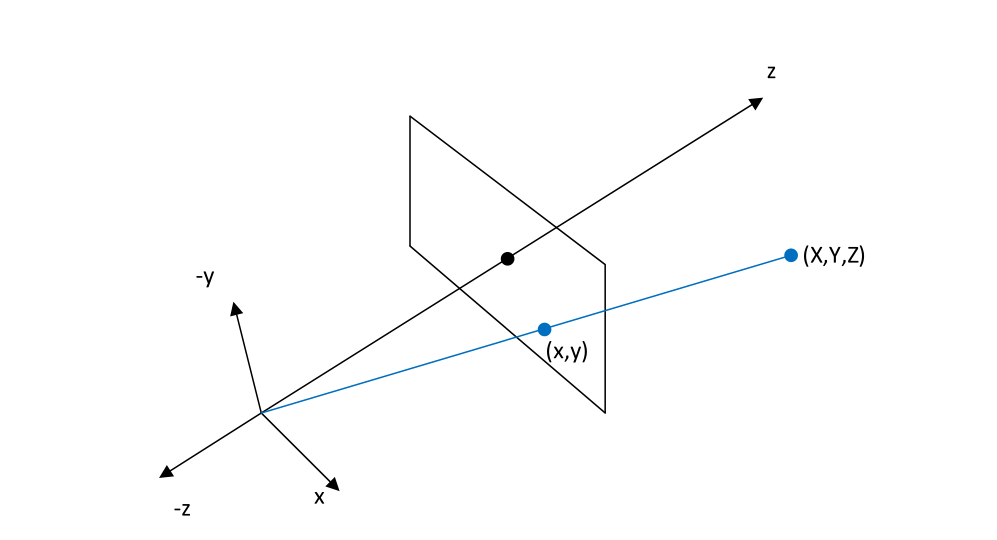
图 3 Map Unmap 方法将摄像机参考帧中的 3d (X,Y,Z) 坐标转换为摄像机 (X,Y) 图像坐标,(X,Y) 图像坐标转换为摄像机坐标帧中的 (X,Y,Z) 方向向量。
# 传感器
iresearchmodessensor 抽象了研究模式传感器。它提供了所有传感器通用的方法和属性:
DECLARE_INTERFACE_IID_(IResearchModeSensor, IUnknown, "4D4D1D4B-9FDD-4001-BA1E-
F8FAB1DA14D0")
{
STDMETHOD(OpenStream()) = 0;
STDMETHOD(CloseStream()) = 0;
STDMETHOD_(LPCWSTR, GetFriendlyName)() = 0;
STDMETHOD_(ResearchModeSensorType, GetSensorType)() = 0;
STDMETHOD(GetSampleBufferSize(
_Out_ size_t *pSampleBufferSize)) = 0;
STDMETHOD(GetNextBuffer(
_Outptr_result_nullonfailure_ IResearchModeSensorFrame **ppSensorFrame)) = 0;
};
- OpenStream 将传感器置于产生帧的状态。这必须在检索缓冲区之前调用
- CloseStream 停止帧捕捉
- GetFriendlyName 返回一个包含传感器名称的字符串
- GetSensorType 返回传感器类型
- GetNextBuffer 返回下一个可用的缓冲区。这是一个阻塞调用
传感器可以有以下几种类型:
enum ResearchModeSensorType
{
LEFT_FRONT,
LEFT_LEFT,
RIGHT_FRONT,
RIGHT_RIGHT,
DEPTH_AHAT,
DEPTH_LONG_THROW,
IMU_ACCEL,
IMU_GYRO,
IMU_MAG
};
每个传感器对象都定义了可以通过 QIed 实现的传感器特定接口。这些将检索传感器特定的信息。
# 传感器帧
一旦传感器处于流模式,传感器帧将通过 IResearchModeSensor::GetNextBuffer 从传感器中获取。所有的传感器帧都有一个共同的接口,它返回所有类型帧的共同的帧信息。缓冲区中包含帧数据的内存归帧对象所有。当释放帧接口时,内存也随之释放。帧接口提供了可以用来访问帧中包含的数据的方法。
DECLARE_INTERFACE_IID_(IResearchModeSensorFrame, IUnknown, "73479614-89C9-4FFD-9C16-
615BC32C6A09")
{
STDMETHOD(GetResolution(
_Out_ ResearchModeSensorResolution *pResolution)) = 0;
// For frames with batched samples this returns the time stamp for the first sample
in the frame.
STDMETHOD(GetTimeStamp(
_Out_ ResearchModeSensorTimestamp *pTimeStamp)) = 0;
};
所有传感器帧接口请参见《附录传感器帧》。
每个传感器都有自己的帧专用接口
- 所有的帧类型:
- 帧时间戳。这些是 HostTicks 和 SensorTicks。HostTicks 是以 filetime 为单位的 CPU 时间,SensorTicks 是以纳秒为单位的传感器滴答数。
- 以字节为单位的样本大小
- 相机帧
- 所有的相机帧都提供分辨率,曝光,增益
- VLC 相机帧返回灰度缓冲
- 深度长投相机帧包含有效的亮度缓冲,距离缓冲和 sigma 缓冲
- 深度 AHAT 相机帧包含一个有效的亮度缓冲和距离缓冲
- IMU 帧包含大量传感器样本。每个传感器样本都是一个结构体,它包含一个传感器值和相应的 SocTicks (HostTicks)、VinylHupTicks (SensorTicks) 和温度
- 加速度计的值是 3 个 m/s^2 加速度
- 陀螺计的值是三个角速度,单位是 deg/s
- 磁强计帧包含磁强计值
# VLC 帧载荷
VLC 帧实现以下接口
DECLARE_INTERFACE_IID_(IResearchModeSensorVLCFrame, IUnknown, "5C693123-3851-4FDC-A2D9-
51C68AF53976")
{
STDMETHOD(GetBuffer(
_Outptr_ const BYTE **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
STDMETHOD(GetGain(
_Out_ UINT32 *pGain)) = 0;
STDMETHOD(GetExposure(
_Out_ UINT64 *pExposure)) = 0;
};
GetBuffer 返回一个指向内存的指针,该指针包含灰度像素帧。这些是行主字节像素,值从 0 到 255。缓冲区的大小从帧的 IResearchModeSensorFrame::GetResolution 接口获取。
增益的值从 0 到 255,曝光的单位是纳秒。
下面的代码展示了如何从 VLC 帧中提取分辨率、曝光、增益、时间戳和图像数据。
void ProcessFrame(IResearchModeSensor *pSensor, IResearchModeSensorFrame* pSensorFrame,
int bufferCount)
{
ResearchModeSensorResolution resolution;
ResearchModeSensorTimestamp timestamp;
wchar_t filename[260];
const BYTE *pImage = nullptr;
IResearchModeSensorVLCFrame *pVLCFrame = nullptr;
HRESULT hr = S_OK;
size_t outBufferCount;
pSensorFrame->GetResolution(&resolution);
pSensorFrame->GetTimeStamp(×tamp);
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pVLCFrame));
if (SUCCEEDED(hr))
{
UINT32 gain;
UINT64 exposure;
pVLCFrame->GetBuffer(&pImage, &outBufferCount);
// Add code to process frame pixels here.
swprintf_s(filename, L"%s_%d_ts%d.bmp", pSensor->GetFriendlyName(), bufferCount,
timestamp.HostTicks);
// The pixel data is at pImage memory address. Pixels are BYTES from 0-255 and frame is for major.
swprintf_s(filename, L" %S_%d_ts%d.bmp\n", pSensor->GetFriendlyName(),
bufferCount, timestamp.HostTicks);
OutputDebugStringW(filename);
hr = pVLCFrame->GetGain(&gain);
if (SUCCEEDED(hr))
{
swprintf_s(filename, L" Gain %d\n", gain);
OutputDebugStringW(filename);
}
hr = pVLCFrame->GetExposure(&exposure);
if (SUCCEEDED(hr))
{
swprintf_s(filename, L" Exposure %d\n", exposure);
OutputDebugStringW(filename);
}
}
# AHAT 和长抛摄像机帧载荷
深度帧实现以下接口:
DECLARE_INTERFACE_IID_(IResearchModeSensorDepthFrame, IUnknown, "35167E38-E020-43D9-898E-
6CB917AD86D3")
{
STDMETHOD(GetBuffer(
_Outptr_ const UINT16 **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
STDMETHOD(GetAbDepthBuffer(
_Outptr_ const UINT16 **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
STDMETHOD(GetSigmaBuffer(
_Outptr_ const BYTE **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
};
在长抛模式下的深度相机帧有一个深度缓冲和一个 sigma 缓冲用于无效的深度像素,和一个有效的亮度 (Ab) 缓冲。在 AHAT 模式下,它只有深度缓冲和有效的亮度缓冲。
有效亮度缓冲区返回所谓的 IR 读数。在干净的红外读数中的像素值与从场景返回的光量成比例。该图像看起来与常规的红外图像相似。
长抛的 sigma 缓冲区用于基于深度算法计算的无效掩码使不可靠的深度失效。为了提高效率,AHAT 将无效代码嵌入深度通道本身。
# 长抛失效
它将失效码和置信度嵌入到每个像素的 8 位数据缓冲器中。如果最高有效位 (MSB) 设置为 1,则其他 7 位表示失效原因。无效掩码是:
- Invalid = 0x80, // MSB 最高有效位
- OutOfBounds = 0xC0, // 主动红外照明罩外
- SignalSaturated = 0xA0, // 饱和的红外信号
- FilterOutlier = 0x90, // 过滤异常值
- EmptySignal = 0x88, // 低红外信号
- MultiPathDetected = 0x84, // 多路径干扰检测(从场景中多个对象接收信号)
- OutOfRangeFar = 0x82, // 超过最大支持范围 (设置为 7500mm)
- OutOfRangeNear = 0x81 // 超过最小支持范围 (设置为 200mm)
# AHAT 无效
对于 AHAT,在深度信道中嵌入了失效码。大于 4090 的像素是无效的。无效的代码是:
- 4095:在主动红外照明罩外面
- 4093:低红外信号
读取 AHAT 和长抛深度帧:
分辨率、曝光、增益和时间戳可以按照上面的方法读取。下面的代码展示了如何从 Long Throw 和 AHAT 帧中提取和处理缓冲区。
void ProcessFrame(IResearchModeSensor *pSensor, IResearchModeSensorFrame* pSensorFrame,
int bufferCount)
{
ResearchModeSensorResolution resolution;
ResearchModeSensorTimestamp timestamp;
wchar_t filename[260];
IResearchModeSensorDepthFrame *pDepthFrame = nullptr;
const UINT16 *pAbImage = nullptr;
const UINT16 *pDepth = nullptr;
// sigma buffer needed only for Long Throw
const BYTE *pSigma = nullptr;
// invalidation mask for Long Throw
USHORT mask = 0x80;
// invalidation value for AHAT
USHORT maxValue = 4090;
HRESULT hr = S_OK;
size_t outBufferCount;
pSensorFrame->GetResolution(&resolution);
pSensorFrame->GetTimeStamp(×tamp);
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pDepthFrame));
bool isLongThrow = (pSensor->GetSensorType() == DEPTH_LONG_THROW);
if (SUCCEEDED(hr) && isLongThrow)
{
// extract sigma buffer for Long Throw
hr = pDepthFrame->GetSigmaBuffer(&pSigma, &outBufferCount);
// Add code to process buffer here.
}
if (SUCCEEDED(hr))
{
// extract depth buffer
hr = pDepthFrame->GetBuffer(&pDepth, &outBufferCount);
// validate depth
for (size_t i = 0; i < outBufferCount; ++i)
{
// use a different invalidation condition for Long Throw and AHAT
const bool isInvalid = isLongThrow ? ((pSigma[i] & mask) > 0) :
(pDepth[i] >= maxValue));
if (isInvalid)
{
pDepth[i] = 0;
}
}
// Add code to process buffer here.
}
if (SUCCEEDED(hr))
{
// extract active brightness buffer
hr = pDepthFrame->GetAbDepthBuffer(&pAbImage, &outBufferCount);
// Add code to process buffer here.
}
if (pDepthFrame)
{
pDepthFrame->Release();
}
}
# IMU 帧载荷
IMU 帧实现以下接口:
DECLARE_INTERFACE_IID_(IResearchModeAccelFrame, IUnknown, "42AA75F8-E3FE-4C25-88C6-
F2ECE1E8A2C5")
{
STDMETHOD(GetCalibratedAccelaration(
_Out_ DirectX::XMFLOAT3 *pAccel)) = 0;
STDMETHOD(GetCalibratedAccelarationSamples(
_Outptr_ const AccelDataStruct **ppAccelBuffer,
_Out_ size_t *pBufferOutLength)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeGyroFrame, IUnknown, "4C0C5EE7-CBB8-4A15-A81F-
943785F524A6")
{
STDMETHOD(GetCalibratedGyro(
Out_ DirectX::XMFLOAT3 *pGyro)) = 0;
STDMETHOD(GetCalibratedGyroSamples(
_Outptr_ const GyroDataStruct **ppAccelBuffer,
_Out_ size_t *pBufferOutLength)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeMagFrame, IUnknown, "2376C9D2-7F3D-456E-A39E-
3B7730DDA9E5")
{
STDMETHOD(GetMagnetometer(
_Out_ DirectX::XMFLOAT3 *pMag)) = 0;
STDMETHOD(GetMagnetometerSamples(
_Outptr_ const MagDataStruct **ppMagBuffer,
_Out_ size_t *pBufferOutLength)) = 0;
};
- 加速度计帧 - 包含沿 X、Y、Z 轴的线性加速度以及重力。
- 陀螺仪框架 - 包含旋转。
- 磁强计 - 包含绝对方位估计。
IMU 帧包含 IMU 批量样品。每个样本是下列之一:
struct AccelDataStruct
{
uint64_t VinylHupTicks; // Sensor ticks in micro seconds
uint64_t SocTicks;
float AccelValues[3]; // In m/(s*s)
float temperature;
};
struct GyroDataStruct
{
uint64_t VinylHupTicks; // Sensor ticks in micro seconds
uint64_t SocTicks;
float GyroValues[3];
float temperature;
};
struct MagDataStruct
{
uint64_t VinylHupTicks; // Sensor ticks in micro seconds
uint64_t SocTicks;
float MagValues[3];
};
读取 IMU 帧的一个样本:
下面的代码显示了如何从 IMU 帧的单个样本中提取 IMU 数据
void PrintSensorValue(IResearchModeSensorFrame *pSensorFrame)
{
DirectX::XMFLOAT3 sample;
IResearchModeGyroFrame *pSensorGyroFrame = nullptr;
IResearchModeAccelFrame *pSensorAccelFrame = nullptr;
IResearchModeMagFrame *pSensorMagFrame = nullptr;
char printString[1000];
HRESULT hr = S_OK;
ResearchModeSensorTimestamp timeStamp;
UINT64 lastSocTickDelta = 0;
pSensorFrame->GetTimeStamp(&timeStamp);
if (glastSocTick != 0)
{
lastSocTickDelta = timeStamp.HostTicks - glastSocTick;
}
glastSocTick = timeStamp.HostTicks;
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pSensorAccelFrame));
if (SUCCEEDED(hr))
{
hr = pSensorAccelFrame->GetCalibratedAccelaration(&sample);
if (FAILED(hr))
{
return;
}
sprintf(printString, "####Accel: % 3.4f % 3.4f % 3.4f %f %d\n",
sample.x,
sample.y,
sample.z,
sqrt(sample.x * sample.x + sample.y * sample.y + sample.z * sample.z),
(lastSocTickDelta * 1000) / timeStamp.HostTicksPerSecond
);
OutputDebugStringA(printString);
pSensorAccelFrame->Release();
return;
}
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pSensorGyroFrame));
if (SUCCEEDED(hr))
{
hr = pSensorGyroFrame->GetCalibratedGyro(&sample);
if (FAILED(hr))
{
return;
}
sprintf(printString, "####Gyro: % 3.4f % 3.4f % 3.4f %f %d\n",
sample.x,
sample.y,
sample.z,
sqrt(sample.x * sample.x + sample.y * sample.y + sample.z * sample.z),
(lastSocTickDelta * 1000) / timeStamp.HostTicksPerSecond
);
OutputDebugStringA(printString);
pSensorGyroFrame->Release();
return;
}
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pSensorMagFrame));
if (SUCCEEDED(hr))
{
hr = pSensorMagFrame->GetMagnetometer(&sample);
if (FAILED(hr))
{
return;
}
sprintf(printString, "####Mag: % 3.4f % 3.4f % 3.4f %d\n",
sample.x,
sample.y,
sample.z,
(lastSocTickDelta * 1000) / timeStamp.HostTicksPerSecond
);
OutputDebugStringA(printString);
pSensorMagFrame->Release();
return;
}
}
读取 IMU 帧的所有 IMU 样本:
下面的代码显示了如何从 IMU 帧的所有样本中提取 IMU 数据
void PrintSensorValue(IResearchModeSensorFrame *pSensorFrame)
{
DirectX::XMFLOAT3 sample;
IResearchModeGyroFrame *pSensorGyroFrame = nullptr;
IResearchModeAccelFrame *pSensorAccelFrame = nullptr;
IResearchModeMagFrame *pSensorMagFrame = nullptr;
char printString[1000];
HRESULT hr = S_OK;
ResearchModeSensorTimestamp timeStamp;
UINT64 lastSocTickDelta = 0;
pSensorFrame->GetTimeStamp(&timeStamp);
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pSensorAccelFrame));
if (SUCCEEDED(hr))
{
const AccelDataStruct *pAccelBuffer;
size_t BufferOutLength;
hr = pSensorAccelFrame->GetCalibratedAccelarationSamples(
&pAccelBuffer,
&BufferOutLength);
if (FAILED(hr))
{
return;
}
for (UINT i = 0; i < BufferOutLength; i++)
{
sample.x = pAccelBuffer[i].AccelValues[0];
sample.y = pAccelBuffer[i].AccelValues[1];
sample.z = pAccelBuffer[i].AccelValues[2];
if (glastHupTick != 0)
{
lastSocTickDelta = pAccelBuffer[i].VinylHupTicks - glastHupTick;
sprintf(printString, "####Accel-%3d-%3d-%3d: % 3.4f % 3.4f % 3.4f %f %d\n",
gBatchCount,
i,
BufferOutLength,
sample.x,
sample.y,
sample.z,
sqrt(sample.x * sample.x + sample.y * sample.y + sample.z * sample.z),
lastSocTickDelta / 1000 // micro seconds
);
}
glastHupTick = pAccelBuffer[i].VinylHupTicks;
OutputDebugStringA(printString);
}
gBatchCount++;
pSensorAccelFrame->Release();
return;
}
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pSensorGyroFrame));
if (SUCCEEDED(hr))
{
const GyroDataStruct *pGyroBuffer;
size_t BufferOutLength;
hr = pSensorGyroFrame->GetCalibratedGyroSamples(
&pGyroBuffer,
&BufferOutLength);
if (FAILED(hr))
{
return;
}
for (UINT i = 0; i < BufferOutLength; i++)
{
sample.x = pGyroBuffer[i].GyroValues[0];
sample.y = pGyroBuffer[i].GyroValues[1];
sample.z = pGyroBuffer[i].GyroValues[2];
if (glastHupTick != 0)
{
lastSocTickDelta = pGyroBuffer[i].VinylHupTicks - glastHupTick;
sprintf(printString, "####Gyro-%3d-%3d-%3d: % 3.4f % 3.4f % 3.4f %f %d\n",
gBatchCount,
i,
BufferOutLength,
sample.x,
sample.y,
sample.z,
sqrt(sample.x * sample.x + sample.y * sample.y + sample.z * sample.z),
lastSocTickDelta / 1000 // micro seconds
);
}
glastHupTick = pGyroBuffer[i].VinylHupTicks;
OutputDebugStringA(printString);
}
gBatchCount++;
pSensorGyroFrame->Release();
return;
}
hr = pSensorFrame->QueryInterface(IID_PPV_ARGS(&pSensorMagFrame));
if (SUCCEEDED(hr))
{
const MagDataStruct *pMagBuffer;
size_t BufferOutLength;
hr = pSensorMagFrame->GetMagnetometerSamples(
&pMagBuffer,
&BufferOutLength);
if (FAILED(hr))
{
return;
}
for (UINT i = 0; i < BufferOutLength; i++)
{
sample.x = pMagBuffer[i].MagValues[0];
sample.y = pMagBuffer[i].MagValues[1];
sample.z = pMagBuffer[i].MagValues[2];
if (glastHupTick != 0)
{
lastSocTickDelta = pMagBuffer[i].VinylHupTicks - glastHupTick;
sprintf(printString, "####Mag-%3d-%3d: % 3.4f % 3.4f % 3.4f %d\n",
gBatchCount,
i,
sample.x,
sample.y,
sample.z,
lastSocTickDelta / 1000 // micro seconds
);
}
glastHupTick = pMagBuffer[i].VinylHupTicks;
OutputDebugStringA(printString);
}
gBatchCount++;
pSensorMagFrame->Release();
return;
}
}
# 同意提示
任何使用研究模式 API 访问摄像机或 imu 的 UWP 应用程序在打开流之前必须征得用户同意。根据用户的输入,应用程序应该进一步进行。
以下步骤概述了在 UWP 应用程序中添加同意提示所需的代码:
- 为了让用户同意摄像头和 IMU 的访问,请确保在应用程序清单中声明以下功能:
<DeviceCapability Name="webcam" /><DeviceCapability Name="backgroundSpatialPerception"/> - 查询 Research Mode API 中实现同意检测的 SensorDeviceConsent 接口:
hr = m_pSensorDevice->QueryInterface(IID_PPV_ARGS(&m_pSensorDeviceConsent)); - 在流可以被打开 (OpenStream) 之前,必须获得同意。通过回调返回同意结果。将同意响应与 API 调用者同步的一种方法是在同意回调上设置事件。
ResearchModeSensorConsent camAccessCheck; HANDLE camConsentGiven; camConsenGiven = CreateEvent(nullptr, true, false, nullptr); - 在应用程序的主 UI 线程中注册相机和 / 或 IMU 同意回调。
hr = m_pSensorDeviceConsent->RequestCamAccessAsync(CamAccessOnComplete); - 定义捕获用户同意的回调函数,并设置为此操作创建的事件。
void CamAccessOnComplete(ResearchModeConsent consent) { camAccessCheck = consent; SetEvent(camConsentGiven); } - 如果使用了工作线程,则等待回调,并寻找用户提供的同意,然后继续。
void CameraUpdateThread(SlateCameraRenderer* pSlateCameraRenderer, HANDLE camConsentGiven, Res
earchModeSensorConsent *camAccessConsent)
{
HRESULT hr = S_OK;
DWORD waitResult = WaitForSingleObject(camConsentGiven, INFINITE);
// wait for the event to be set and check for the consent provided by the user.
if (waitResult == WAIT_OBJECT_0)
{
switch (*camAccessConsent)
{
case ResearchModeSensorConsent::Allowed:
OutputDebugString(L"Access is granted");
break;
case ResearchModeSensorConsent::DeniedBySystem:
OutputDebugString(L"Access is denied by the system");
hr = E_ACCESSDENIED;
break;
case ResearchModeSensorConsent::DeniedByUser:
OutputDebugString(L"Access is denied by the user");
hr = E_ACCESSDENIED;
break;
case ResearchModeSensorConsent::NotDeclaredByApp:
OutputDebugString(L"Capability is not declared in the app manifest");
hr = E_ACCESSDENIED;
break;
case ResearchModeSensorConsent::UserPromptRequired:
OutputDebugString(L"Capability user prompt required");
hr = E_ACCESSDENIED;
break;
default:
OutputDebugString(L"Access is denied by the system");
hr = E_ACCESSDENIED;
break;
}
}
else
{
hr = E_UNEXPECTED;
}
if (SUCCEEDED(hr))
{
hr = pSlateCameraRenderer->m_pRMCameraSensor->OpenStream();
}
}
为了测试你的应用程序是否正确地执行了这些检查,请确保在应用程序输出之前,检查 camera 和 / 或 IMUs 的提示是否出现。而且,对于每个用户来说,提示只在第一次使用应用程序时出现。要撤销访问权限,在 “设置” 中修改以下内容:
- 进入设置 -> 隐私 -> 相机→应用程序,并关闭相机的访问
- 进入设置 -> 隐私→用户移动→应用程序,关闭 imu 的访问。
# 设置
# 要求清单条目
例子请看:https://github.com/microsoft/HoloLens2ForCV/blob/main/Samples/SensorVisualization/SensorVisualization/Package.appxmanifest
<Capabilities> | |
<Capability Name="internetClient" /> | |
<uap:Capability Name="documentsLibrary" /> | |
<rescap:Capability Name="perceptionSensorsExperimental" /> | |
<DeviceCapability Name="webcam" /> | |
<DeviceCapability Name="wifiControl" /> | |
<DeviceCapability Name="backgroundSpatialPerception" /> | |
</Capabilities> |
# API 参考
# 设备接口
DECLARE_INTERFACE_IID_(IResearchModeSensorDevice, IUnknown, "65E8CC3C-3A03-4006-AE0D-
34E1150058CC")
{
STDMETHOD(DisableEyeSelection()) = 0;
STDMETHOD(EnableEyeSelection()) = 0;
STDMETHOD(GetSensorCount(
_Out_ size_t *pOutCount)) = 0;
STDMETHOD(GetSensorDescriptors(
_Out_writes_(sensorCount) ResearchModeSensorDescriptor *pSensorDescriptorData,
size_t sensorCount,
_Out_ size_t *pOutCount)) = 0;
STDMETHOD(GetSensor(
ResearchModeSensorType sensorType,
_Outptr_result_nullonfailure_ IResearchModeSensor **ppSensor)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeSensorDevicePerception, IUnknown, "C1678F4B-ECB4-
47A8-B6FA-97DBF4417DB2")
{
STDMETHOD(GetRigNodeId(
_Outptr_ GUID *pRigNodeId)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeSensorDeviceConsent, IUnknown, "EAB9D672-9A88-4E43-
8A69-9BA8f23A4C76")
{
STDMETHOD_(HRESULT, RequestCamAccessAsync)(void
(*camCallback)(ResearchModeSensorConsent))= 0;
STDMETHOD_(HRESULT, RequestIMUAccessAsync)(void
(*imuCallback)(ResearchModeSensorConsent)) = 0;
};
# 传感器接口
DECLARE_INTERFACE_IID_(IResearchModeSensor, IUnknown, "4D4D1D4B-9FDD-4001-BA1E-
F8FAB1DA14D0")
{
STDMETHOD(OpenStream()) = 0;
STDMETHOD(CloseStream()) = 0;
STDMETHOD_(LPCWSTR, GetFriendlyName)() = 0;
STDMETHOD_(ResearchModeSensorType, GetSensorType)() = 0;
STDMETHOD(GetSampleBufferSize(
_Out_ size_t *pSampleBufferSize)) = 0;
STDMETHOD(GetNextBuffer(
_Outptr_result_nullonfailure_ IResearchModeSensorFrame **ppSensorFrame)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeCameraSensor, IUnknown, "3BDB4977-960B-4F5D-8CA3-
D21E68F26E76")
{
STDMETHOD(MapImagePointToCameraUnitPlane(
float (&uv) [2],
float (&xy) [2])) = 0;
STDMETHOD(MapCameraSpaceToImagePoint(
float(&xy)[2],
float(&uv)[2])) = 0;
STDMETHOD(GetCameraExtrinsicsMatrix(DirectX::XMFLOAT4X4 *pCameraViewMatrix)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeAccelSensor, IUnknown, "627A7FAA-55EA-4951-B370-
26186395AAB5")
{
STDMETHOD(GetExtrinsicsMatrix(DirectX::XMFLOAT4X4 *pAccel)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeGyroSensor, IUnknown, "E6E8B36F-E6E7-494C-B4A8-
7CFA2561BEE7")
{
STDMETHOD(GetExtrinsicsMatrix(DirectX::XMFLOAT4X4 *pGyro)) = 0;
};
# 传感器帧
DECLARE_INTERFACE_IID_(IResearchModeSensorVLCFrame, IUnknown, "5C693123-3851-4FDC-A2D9-
51C68AF53976")
{
STDMETHOD(GetBuffer(
_Outptr_ const BYTE **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
STDMETHOD(GetGain(
_Out_ UINT32 *pGain)) = 0;
STDMETHOD(GetExposure(
_Out_ UINT64 *pExposure)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeSensorDepthFrame, IUnknown, "35167E38-E020-43D9-898E-
6CB917AD86D3")
{
STDMETHOD(GetBuffer(
_Outptr_ const UINT16 **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
STDMETHOD(GetAbDepthBuffer(
_Outptr_ const UINT16 **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
STDMETHOD(GetSigmaBuffer(
_Outptr_ const BYTE **ppBytes,
_Out_ size_t *pBufferOutLength)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeAccelFrame, IUnknown, "42AA75F8-E3FE-4C25-88C6-
F2ECE1E8A2C5")
{
STDMETHOD(GetCalibratedAccelaration(
_Out_ DirectX::XMFLOAT3 *pAccel)) = 0;
STDMETHOD(GetCalibratedAccelarationSamples(
_Outptr_ const AccelDataStruct **ppAccelBuffer,
_Out_ size_t *pBufferOutLength)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeGyroFrame, IUnknown, "4C0C5EE7-CBB8-4A15-A81F-
943785F524A6")
{
STDMETHOD(GetCalibratedGyro(
_Out_ DirectX::XMFLOAT3 *pGyro)) = 0;
STDMETHOD(GetCalibratedGyroSamples(
_Outptr_ const GyroDataStruct **ppAccelBuffer,
_Out_ size_t *pBufferOutLength)) = 0;
};
DECLARE_INTERFACE_IID_(IResearchModeMagFrame, IUnknown, "2376C9D2-7F3D-456E-A39E-
3B7730DDA9E5")
{
STDMETHOD(GetMagnetometer(
_Out_ DirectX::XMFLOAT3 *pMag)) = 0;
STDMETHOD(GetMagnetometerSamples(
_Outptr_ const MagDataStruct **ppMagBuffer,
_Out_ size_t *pBufferOutLength)) = 0;
};
# 同意接口
DECLARE_INTERFACE_IID_(IResearchModeSensorDeviceConsent, IUnknown, "EAB9D672-9A88-4E43-
8A69-9BA8f23A4C76")
{
STDMETHOD_(HRESULT, RequestCamAccessAsync)(void
(*camCallback)(ResearchModeSensorConsent))= 0;
STDMETHOD_(HRESULT, RequestIMUAccessAsync)(void
(*imuCallback)(ResearchModeSensorConsent)) = 0;
};