
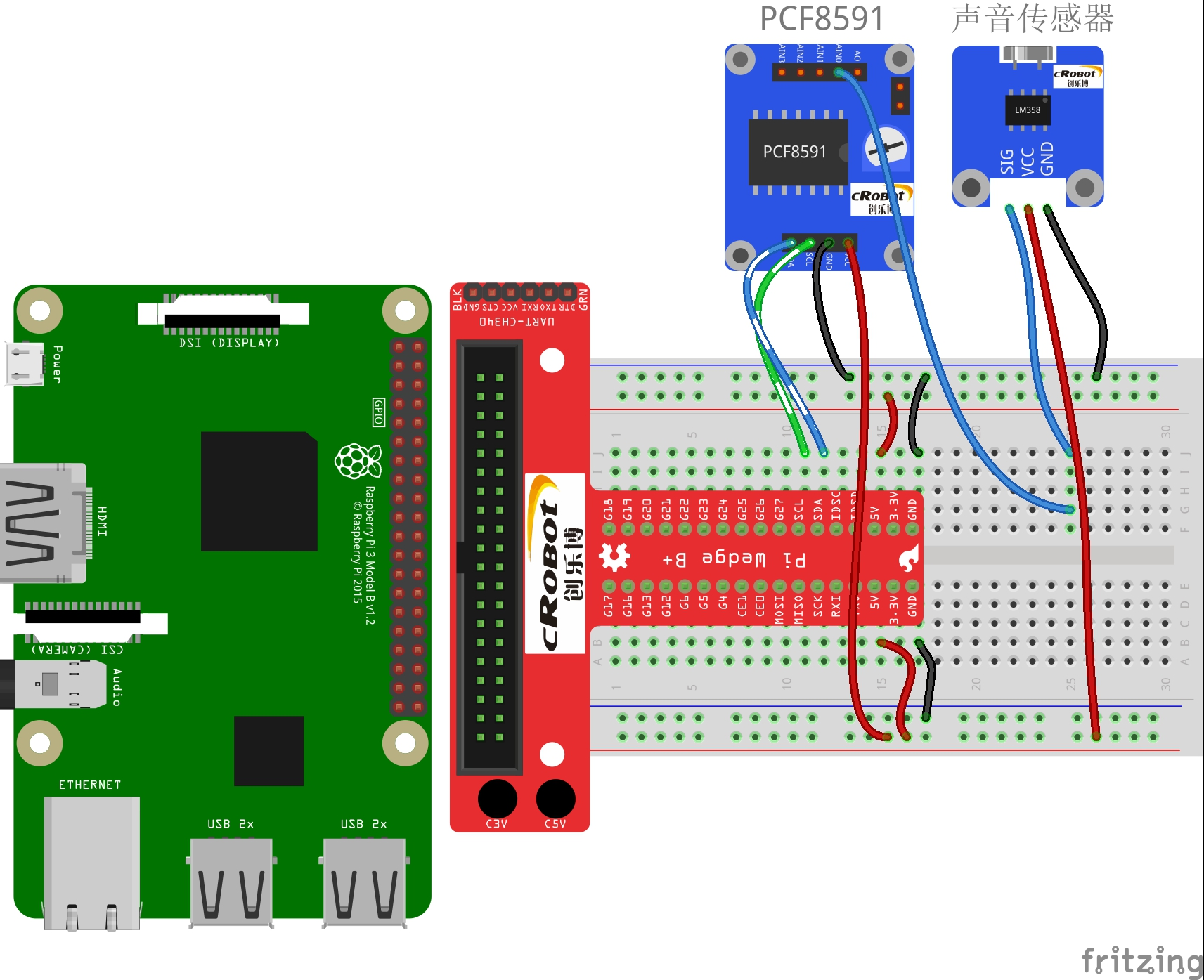
# 接线图
# 树莓派管脚图

# 代码
# C
#include <stdio.h> | |
#include <wiringPi.h> | |
#include <pcf8591.h> | |
#define PCF 120 | |
int main (void) | |
{ | |
int value; | |
int count = 0; | |
wiringPiSetup (); | |
// Setup pcf8591 on base pin 120, and address 0x48 | |
pcf8591Setup (PCF, 0x48); | |
while(1) // loop forever | |
{ | |
value = analogRead (PCF + 0); | |
//printf("%d\n", value); | |
if (value < 50){ | |
count++; | |
printf("Voice In!! %d\n", count); | |
} | |
} | |
return 0; | |
} |
编译命令: gcc sound_sensor.c -o sound_sensor -lwiringPi
# Python
#!/usr/bin/env python | |
import PCF8591 as ADC | |
import RPi.GPIO as GPIO | |
import time | |
GPIO.setmode(GPIO.BCM) | |
def setup(): | |
ADC.setup(0x48) | |
def loop(): | |
count = 0 | |
while True: | |
voiceValue = ADC.read(0) | |
if voiceValue: | |
print 'Value:', voiceValue | |
if voiceValue < 50: | |
print "Voice detected! ", count | |
count += 1 | |
time.sleep(0.2) | |
if __name__ == '__main__': | |
try: | |
setup() | |
loop() | |
except KeyboardInterrupt: | |
pass |
#!/usr/bin/env python | |
#------------------------------------------------------ | |
# | |
# This is a program for PCF8591 Module. | |
# | |
# Warnng! The Analog input MUST NOT be over 3.3V! | |
# | |
# In this script, we use a poteniometer for analog | |
# input, and a LED on AO for analog output. | |
# | |
# you can import this script to another by: | |
# import PCF8591 as ADC | |
# | |
# ADC.Setup(Address) # Check it by sudo i2cdetect -y -1 | |
# ADC.read(channal) # Channal range from 0 to 3 | |
# ADC.write(Value) # Value range from 0 to 255 | |
# | |
#------------------------------------------------------ | |
import smbus | |
import time | |
# for RPI version 1, use "bus = smbus.SMBus(0)" | |
bus = smbus.SMBus(1) | |
#check your PCF8591 address by type in 'sudo i2cdetect -y -1' in terminal. | |
def setup(Addr): | |
global address | |
address = Addr | |
def read(chn): #channel | |
if chn == 0: | |
bus.write_byte(address,0x40) | |
if chn == 1: | |
bus.write_byte(address,0x41) | |
if chn == 2: | |
bus.write_byte(address,0x42) | |
if chn == 3: | |
bus.write_byte(address,0x43) | |
bus.read_byte(address) # dummy read to start conversion | |
return bus.read_byte(address) | |
def write(val): | |
temp = val # move string value to temp | |
temp = int(temp) # change string to integer | |
# print temp to see on terminal else comment out | |
bus.write_byte_data(address, 0x40, temp) | |
if __name__ == "__main__": | |
setup(0x48) | |
while True: | |
print 'AIN0 = ', read(0) | |
print 'AIN1 = ', read(1) | |
tmp = read(0) | |
tmp = tmp*(255-125)/255+125 # LED won't light up below 125, so convert '0-255' to '125-255' | |
write(tmp) | |
# time.sleep(0.3) |