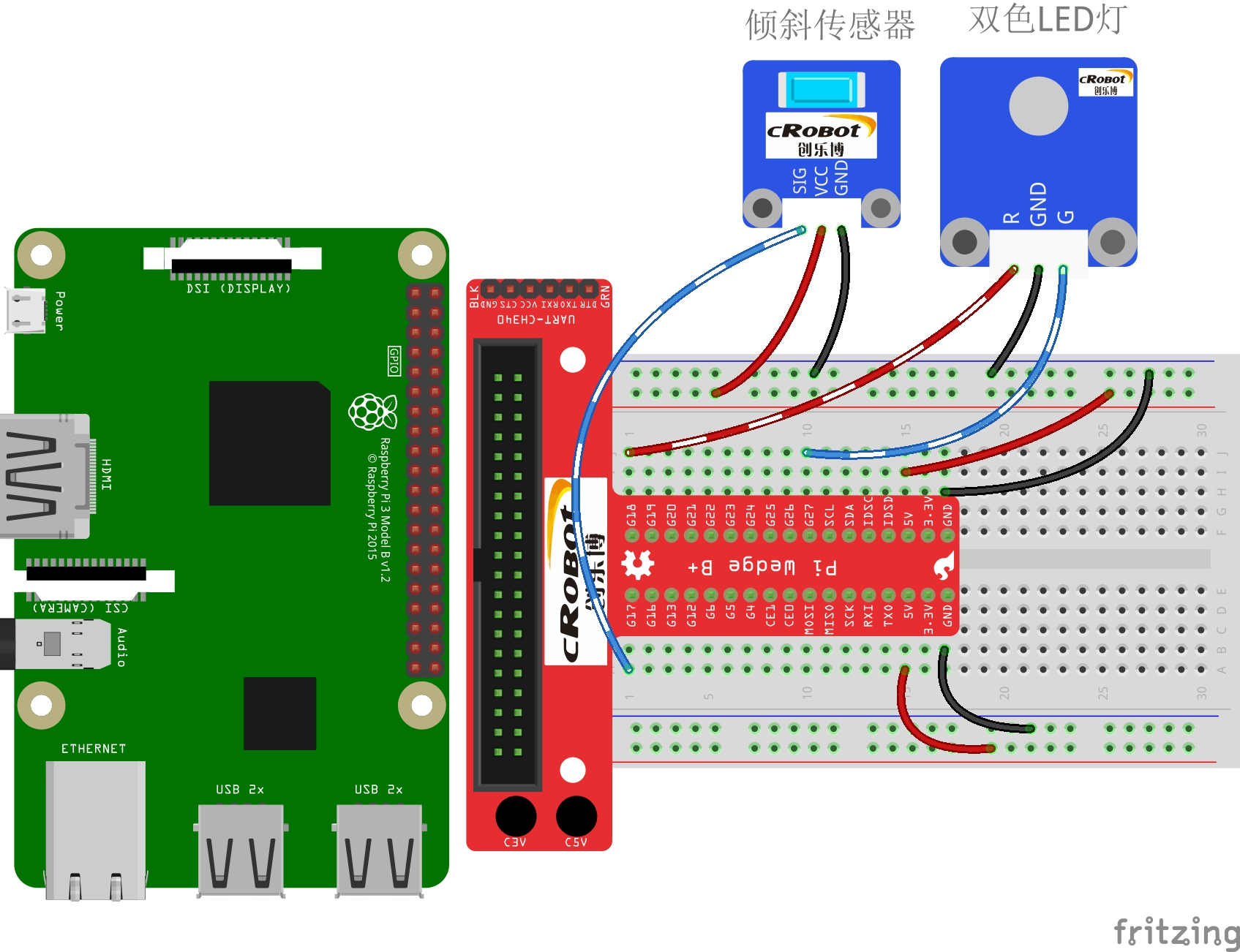
# 接线图
# 树莓派管脚图

# 代码
# C
#include <wiringPi.h> | |
#include <stdio.h> | |
#define TiltPin 0 | |
#define Gpin 1 | |
#define Rpin 2 | |
void LED(char* color) | |
{ | |
pinMode(Gpin, OUTPUT); | |
pinMode(Rpin, OUTPUT); | |
if (color == "RED") | |
{ | |
digitalWrite(Rpin, HIGH); | |
digitalWrite(Gpin, LOW); | |
} | |
else if (color == "GREEN") | |
{ | |
digitalWrite(Rpin, LOW); | |
digitalWrite(Gpin, HIGH); | |
} | |
else | |
printf("LED Error"); | |
} | |
int main(void) | |
{ | |
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen | |
printf("setup wiringPi failed !"); | |
return 1; | |
} | |
pinMode(TiltPin, INPUT); | |
LED("GREEN"); | |
while(1){ | |
if(0 == digitalRead(TiltPin)){ | |
delay(10); | |
if(0 == digitalRead(TiltPin)){ | |
LED("RED"); | |
printf("Tilt!\n"); | |
} | |
} | |
else if(1 == digitalRead(TiltPin)){ | |
delay(10); | |
if(1 == digitalRead(TiltPin)){ | |
while(!digitalRead(TiltPin)); | |
LED("GREEN"); | |
} | |
} | |
} | |
return 0; | |
} |
编译命令: gcc tilt_switch.c -o tilt_switch -lwiringPi
# Python
#!/usr/bin/env python | |
import RPi.GPIO as GPIO | |
TiltPin = 11 | |
Gpin = 12 | |
Rpin = 13 | |
def setup(): | |
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location | |
GPIO.setup(Gpin, GPIO.OUT) # Set Green Led Pin mode to output | |
GPIO.setup(Rpin, GPIO.OUT) # Set Red Led Pin mode to output | |
GPIO.setup(TiltPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Set BtnPin's mode is input, and pull up to high level(3.3V) | |
GPIO.add_event_detect(TiltPin, GPIO.BOTH, callback=detect, bouncetime=200) | |
def Led(x): | |
if x == 0: | |
GPIO.output(Rpin, 1) | |
GPIO.output(Gpin, 0) | |
if x == 1: | |
GPIO.output(Rpin, 0) | |
GPIO.output(Gpin, 1) | |
def Print(x): | |
if x == 0: | |
print ' *************' | |
print ' * Tilt! *' | |
print ' *************' | |
def detect(chn): | |
Led(GPIO.input(TiltPin)) | |
Print(GPIO.input(TiltPin)) | |
def loop(): | |
while True: | |
pass | |
def destroy(): | |
GPIO.output(Gpin, GPIO.HIGH) # Green led off | |
GPIO.output(Rpin, GPIO.HIGH) # Red led off | |
GPIO.cleanup() # Release resource | |
if __name__ == '__main__': # Program start from here | |
setup() | |
try: | |
loop() | |
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed. | |
destroy() |