# 环境
- Python:3.6.5 OpenCV 4.1.2
- C++:OpenCV 4.1.2
- JS:OpenCV 4.5.0
环境搭建可参考:B 站视频
# 知识点
图像噪声:
图像噪声产生的原因很复杂,有的可能是数字信号在传输过程中发生了丢失或者受到干扰,有的是成像设备或者环境本身导致成像质量不稳定,反应到图像上就是图像的亮度与颜色呈现某种程度的不一致性。从噪声的类型上,常见的图像噪声可以分为如下几种:
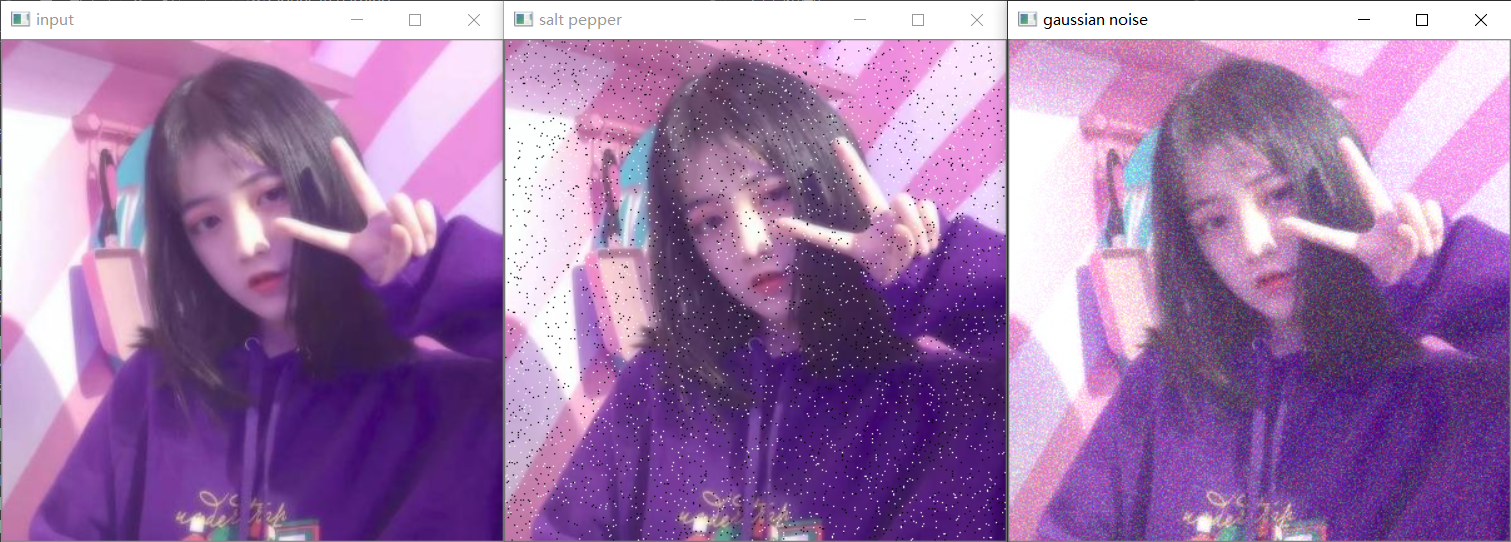
| 椒盐噪声 | 是一种随机在图像中出现的稀疏分布的黑白像素点,对椒盐噪声一种有效的去噪手段就是图像中值滤波 |
| 高斯噪声 / 符合高斯分布 | 一般会在数码相机的图像采集 (acquisition) 阶段发生,这个时候它的物理 / 电 / 光等各种信号都可能导致产生高斯分布噪声 |
| 均匀分布噪声 | 均匀 / 规则噪声一般都是因为某些规律性的错误导致的 |
# C++ 代码
#ifndef DAY24
#define DAY24
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
void add_salt_pepper_noise(Mat &image);
void gaussian_noise(Mat &image);
void day24() {
Mat src = imread("E:\\_Image\\OpenCVTest\\girl2.jpg");
if (src.empty()) {
printf("could not load image...\n");
return;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
add_salt_pepper_noise(src);
gaussian_noise(src);
waitKey();
}
void add_salt_pepper_noise(Mat &image) {
RNG rng(12345);
int h = image.rows;
int w = image.cols;
int nums = 5000;
Mat dst = image.clone();
for (int i = 0; i < nums; i++) {
int x = rng.uniform(0, w);
int y = rng.uniform(0, h);
if (i % 2 == 1) {
dst.at<Vec3b>(y, x) = Vec3b(255, 255, 255);
}
else {
dst.at<Vec3b>(y, x) = Vec3b(0, 0, 0);
}
}
imshow("salt pepper", dst);
}
void gaussian_noise(Mat &image) {
Mat noise = Mat::zeros(image.size(), image.type());
// 通过randn产生高斯随机噪声来填充矩阵,15是高斯均值,30是高斯方差
randn(noise, 15, 30);
Mat dst;
add(image, noise, dst);
imshow("gaussian noise", dst);
}
#endif // !DAY24
# 结果展示